How can we harness modern technology in a way that will allow people to collaborate with business even more intelligently, efficiently and sustainably in the future? The solution is 2D laser scanners on robots. SICK has applied 2D laser scanners to crop robots in order to assist a scientific project at Wageningen University and Research Centre.
How do you navigate agricultural robots through a field? The major challenge of this application can be found not only in the wide variety of crops out there, but also in the fact that crop rows are neither completely straight nor all the same width. Now, Wageningen University and Research Centre has developed a solution that uses SICK Automation’s LMS111 2D laser scanner.
Precision agriculture
Precision agriculture is on the rise but what does it mean? It is a practice that marks a move away from the model of subjecting every field to a standard treatment and instead takes a semi-tailored approach that considers the requirements of each crop. Custom sowing, fertilisation, pesticide application and disease control have the potential to not only save money, but also reduce the impact on the environment.
However, the more efficient benefits that precision agriculture brings are unfortunately not yet enough to outweigh the performance of the large, fast farm machinery that saves significant quantities of manpower.
Recently, however, a solution to this problem has been introduced in the form of small agricultural robots that are able to work in fields 24 hours a day, slowing down or stopping as the situation demands, and operating almost entirely without human input.
Navigation without GPS
A good navigation system is one of the fundamental requirements for using agricultural robots successfully. The system must be able to account for deviations in the shape and size of crops, crooked rows of differing widths, as well as other irregularities.
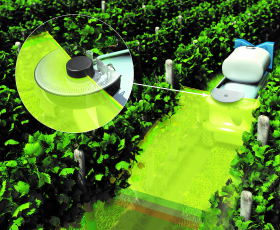
Standard GPS systems are not up to the job. For this reason, the Wageningen University and Research Centre developed a navigation process in which robots would be guided not by a GPS function, but instead by an LMS111 2D laser scanner from SICK Automation.
The LMS111 2D laser scanners collect raw data and then filter the information needed out of this. A whole range of practical tests were performed during the growing season to check whether the system was functioning as it should. The results proved that it is indeed a reliable solution for navigating crop areas cultivated using conventional methods.
Summing up, Dr Frits van Evert from Wageningen University and Research Centre states: “We have invested a great deal of time and energy in this project. Just recently, our efforts put us in a position to publish our findings in a leading scientific journal. I would therefore like to express my sincere thanks to SICK for providing us with the laser scanner for our research.”
For more information contact Mark Madeley, SICK Automation Southern Africa, +27 10 060 0550, [email protected], www.sick.com
The future of robotics
Robotics & Mechatronics
Research into robotics and autonomy uncovers some of the up-and-coming industrial uses and applications within the sector, including for automotives and logistics, as well as for personal and commercial use.
Read more...How vision-guided robotics is transforming South African manufacturing
Robotics & Mechatronics
In South African manufacturing, the final stages of production need more than manual labour or conventional automation. For many, vision-guided robotics is becoming the solution to smarter, more flexible end-of-line processes.
Read more...The future of robotics
Robotics & Mechatronics
Research into robotics and autonomy uncovers some of the up-and-coming industrial uses and applications within the sector, including for automotives and logistics, as well as for personal and commercial use.
Read more...Collaborative robots pioneer automation revolution
Robotics & Mechatronics
Collaborative robots (cobots) are a versatile, cost-effective robot form factor that is demonstrating value across many industry verticals. According to a new report from ABI Research, revenue from cobots will increase from $970 million in 2023 to $7,2 billion by 2030.
Read more...Robotic solution for adhesive tape application with flexible control Beckhoff Automation
Editor's Choice Robotics & Mechatronics
In industry, even elaborate processes, such as the application of adhesive tape to parts with varying geometries are automated. Innovative Automation has developed a platform with Beckhoff control technology and a remote feeding module, which increases productivity and enables flexible customisation for different requirements.
Read more...New AI advisor for robot selection igus
Editor's Choice Robotics & Mechatronics
igus’ new AI chatbot has been added to the online platform RBTX.com. The interactive consultant is designed to enable companies with little previous experience and technological expertise to quickly and reliably put together low-cost automation solutions to becoming more competitive.
Read more...Vertical labelling of test tubes in clinical laboratories Omron Electronics
Robotics & Mechatronics
Werfen has implemented a new automated machine for the supply of reagents to drug toxicology laboratories, built by MACCO in collaboration with OMRON and Marini Pandolfi. It uses OMRON SCARA robots and advanced vision systems to ensure reagent quality through vertical handling and labelling process of test tubes.
Read more...Embracing robotics for SMEs Yaskawa Southern Africa
Robotics & Mechatronics
As industries increasingly integrate robotics and automation into their business operations, South Africa’s SMEs are beginning to recognise the benefits of robotics, and want their piece of the pie.
While every effort has been made to ensure the accuracy of the information contained herein, the publisher and its agents cannot be held responsible for any errors contained, or any loss incurred as a result. Articles published do not necessarily reflect the views of the publishers. The editor reserves the right to alter or cut copy. Articles submitted are deemed to have been cleared for publication. Advertisements and company contact details are published as provided by the advertiser. Technews Publishing (Pty) Ltd cannot be held responsible for the accuracy or veracity of supplied material.







 printer friendly version
printer friendly version